LUKAS Ansatz
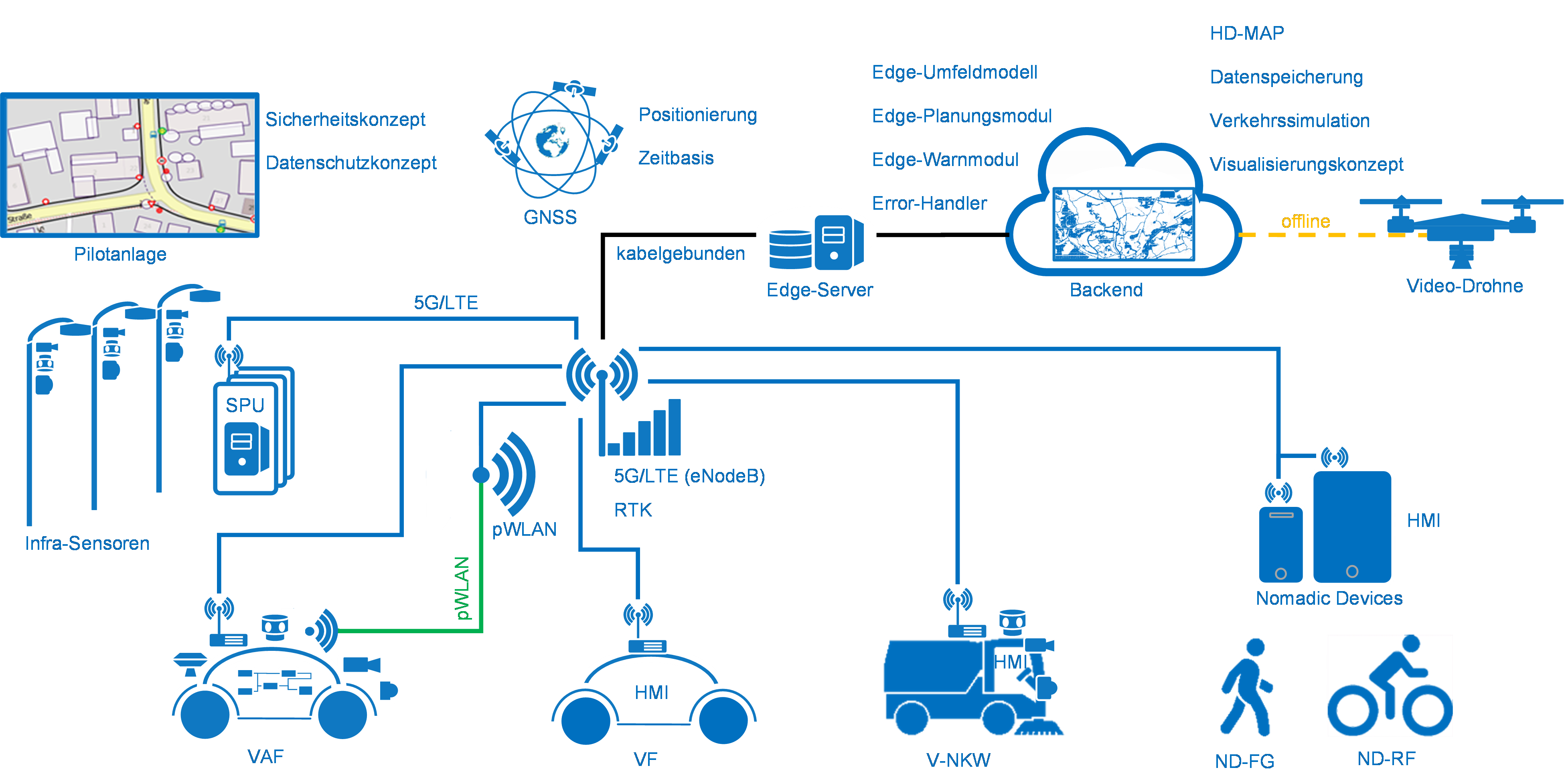
(German, the English version is below) Infrastruktursensoren (Video, RADAR, LiDAR) senden abstrahierte Objektdaten des lokalen Umfeldes (Kreuzung Ulm-Lehr) an einen Edge-Server. In der entgegengesetzten Signalrichtung können die Infrastruktursensoren vom Edge-Server online mit betriebsbedingten Signalen (Ein-, Ausschaltungen, Diagnose-Daten) versorgt werden. Der Edge-Server wird zudem aus dem Backend mit nicht latenzkritischen Informationen versorgt (z.B. Verkehrsregeln, Sperrungen von Streckenabschnitten, Baustellen, öffentlicher Linienverkehr etc.) und kann diese Informationen für eine zentrale Koordination des Verkehrs im lokalen Umfeld zur Verfügung stellen. Weitere Objekt-Informationen, Szenen-Prädiktionen und Trajektorienplanung werden dem Edge-Server einerseits von den vernetzten automatisierten Fahrzeugen, andererseits von nicht-automatisierte Verkehrsteilnehmer, die über Nomadic Devices vernetzt sind, übermittelt. Der Edge-Server nutzt diese Informationen, um eine dynamische Prädiktion der Verkehrsszene des lokalen Umfeldes zu berechnen und kooperative Handlungsplanungen (für automatisierte Fahrzeuge) bzw. Verhaltensanweisungen und/oder Warnungen an die nicht-automatisierten Verkehrsteilnehmer auszugeben. Die Kommunikation erfolgt über ein prototypisches 4G/5G Mobilfunknetz. Zusätzlich werden die Informationen des Edge-Servers auch über ein ad-hoc-Netzwerk an der Kreuzung übertragen.
LUKAS Approach
(English) Infrastructure-based environment sensors (Video, RADAR, LiDAR) transmit abstract object data of a local traffic environment (intersection Ulm-Lehr – LUKAS pilot area) to an edge-server. In the opposite signal direction, the sensors receive maintaining signals (e,g. on/off, diagnosis) from the server. Additionally, the edge-server receives traffic information data which are not time-critical (e.g. traffic rules, road-barriers, public bus traffic, etc.) from the backend and provides this information for a central coordination of the traffic of the local environment. The server gathers further information on relevant road objects and road users, scene prediction and trajectory planning from the connected automated vehicles and from not automated road users (e.g. VRUs) which are connected by nomadic smart devices (smart phones or tablets). The edge-server processes the information for a dynamic prediction of the overall traffic in the local environment and provides a cooperative planning or warnings to the involved road users. Data are transmitted by a prototype 4G/5G mobile network. The Ulm-Lehr intersection is additionally equipped with a pWLAN ad-hoc network.